The performance of TriCCS mounted on the Seimei telescope is described below.
# CMOS| Pixel size | 19 μm |
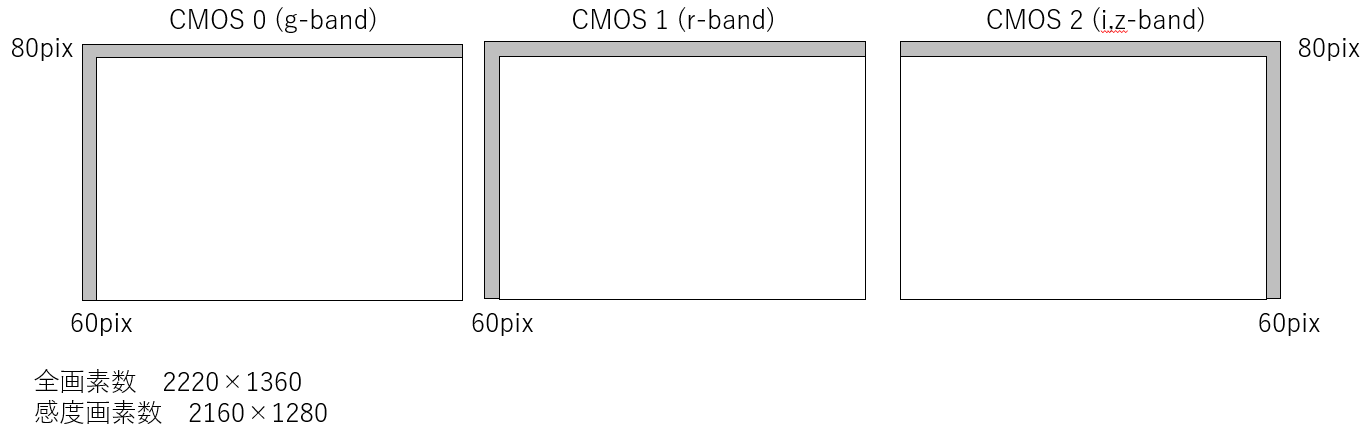
| Number of pixels | 2,220 x 1,360 |
| Number of effective pixels | 2,160 x 1,280 |
| Output bit depth | 14 bit |
| Data size of a image | 6 MByte |
| Maximum data size per night | 8 TByte / CMOS |
| Maximum frame rate | 98 fps with full-image readout |
| Bias count | ~1,000 ADU |
| Linearity | ~1% or better at < 12,000 ADU |
| Saturation count | 16,383 ADU or 72,000 e- |
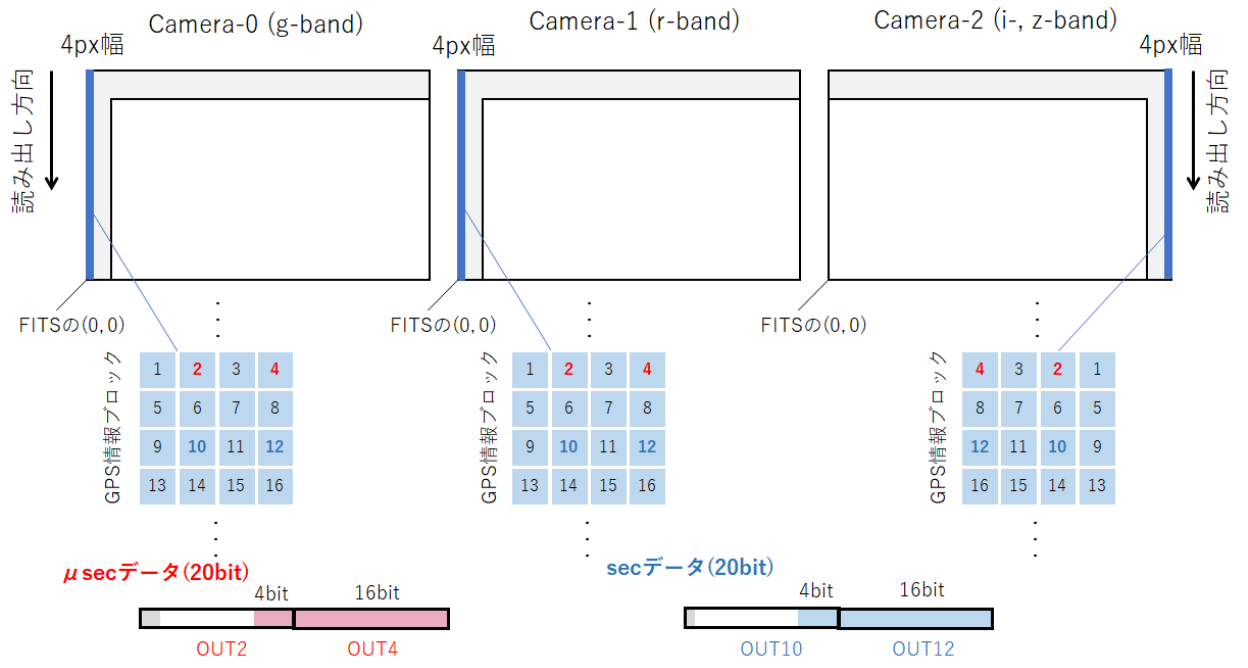
| Time stamp accuracy | ~0.5 millisecond |
| Gain configuration | x1 | x2 | x4 | x8 | x16 | x32 | |
|---|---|---|---|---|---|---|---|
| Inverse gain [e-/ADU] | 6.0 | 3.0 | 1.5 | 0.76 | 0.38 | 0.19 | |
| Saturation count† | [e-] | 72,000 | ~46,000 | ~23,000 | ~11,600 | ~5,800 | ~2,900 |
| [ADU] | ~13,000 | 16,383 | 16,383 | 16,383 | 16,383 | 16,383 | |
| Readout noise [e-] | 28 | 14 | 7.1 | 4.0 | 2.6 | 2.2 | |
| Recommended exposure time per frame [seconds] | -- | >50 | ~5-50 | ~0.5-5 | ~0.05-0.5 | ~0.01-0.05 | |
| Saturation mag. in 10 sec. exposure [AB mag]‡ |
g-band | ~11.8 | ~12.6 | ~13.4 | ~14.1 | ~14.8 | ~15.6 |
| r-band | ~11.6 | ~12.3 | ~13.1 | ~13.8 | ~14.6 | ~15.3 | |
| i-band | ~11.1 | ~11.8 | ~12.6 | ~13.3 | ~14.1 | ~14.8 | |
| z-band | ~9.8 | ~10.6 | ~11.3 | ~12.1 | ~12.8 | ~13.6 |
| Pixel scale | 0.350 arcsec / pixel |
| Total FoV | 12.6 x 7.5 arcmin
FoV for aladin (vot file). Please see like here for usage. |
| Available filters | g2 (or g), r2 (or r), i2, and z-band |
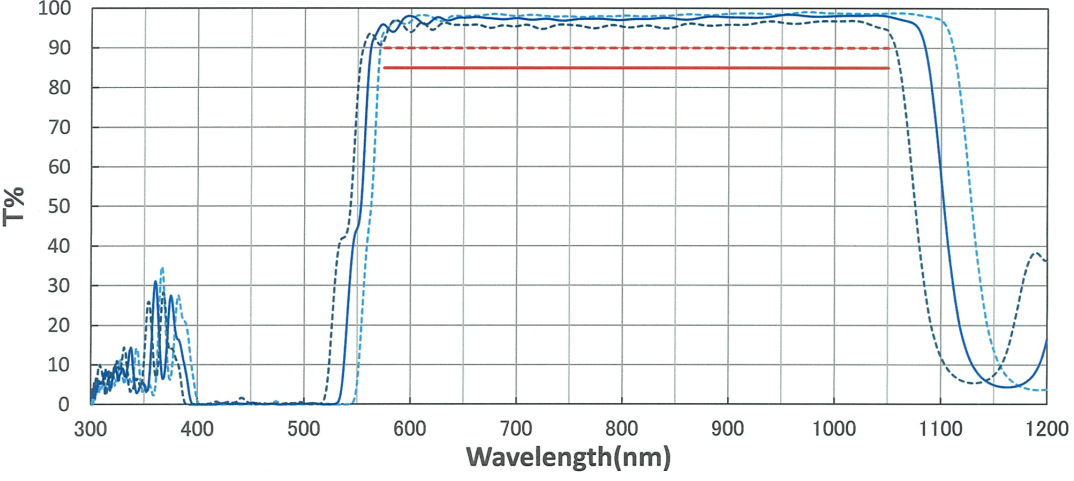
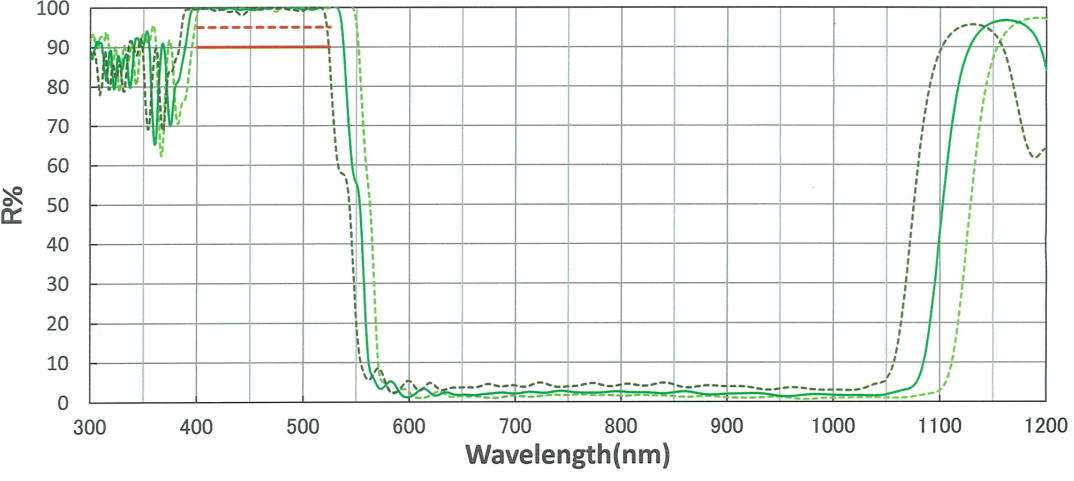
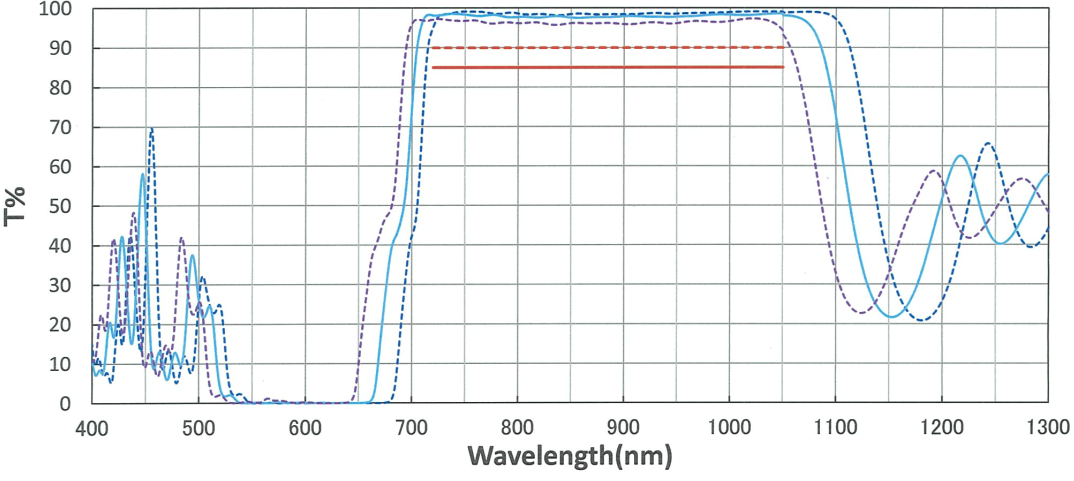
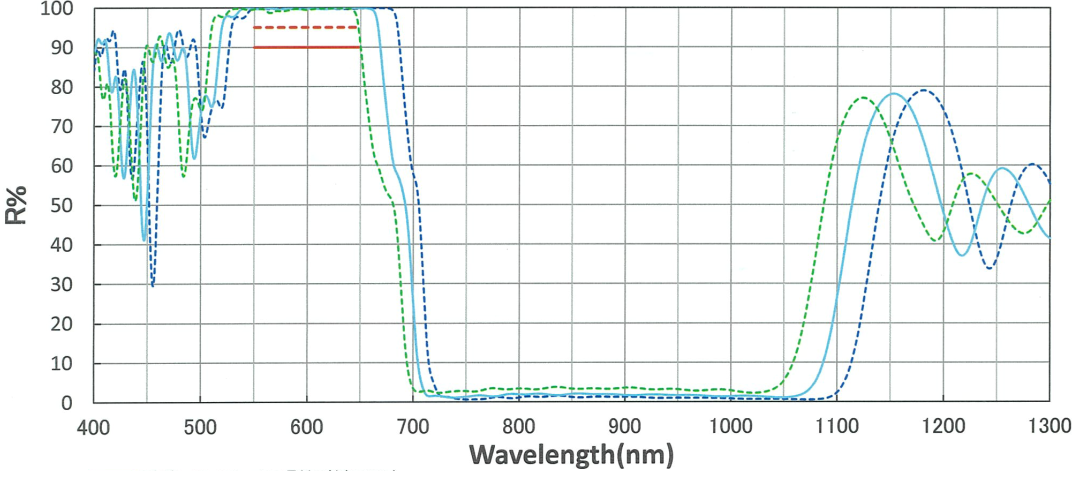
| component | transmittance | reflectance |
|---|---|---|
| Dielectric mirror 1† | ||
| Dielectric mirror 2‡ |
| Overhead time in sequence CMOS read† | 0.4 millisecond |
| Overhead time in fits file creation | 3.0-3.5 seconds |
| Typical time of filter exchange | 10-20 seconds |
{kind=link}
{kind=link}
{kind=link}
{kind=link}